SPI-MASTER 设备
SPI-MASTER简介
串行外设接口(SPI)允许芯片与外部设备以半双工、同步、串行方式通信。此接口仅支持主模式,为外部从设备提供通信时钟(SCK)。通过配置相应的寄存器,可以定义SPI时钟预分配系数、传输模式、Dummy周期、中断功能等。时钟频率最高可达56M,数据宽度32bit,支持QSPI模式。
QSPI是Queued SPI简写,是Motorola公司推出的SPI接口扩展,比SPI应用更加广泛。在SPI协议的基础上,Motorola公司对其功能进行了增强,增加了队列传输的机制,推出了队列串行外围接口协议(即QSPI协议)。QSPI是一种专用的通信接口,连接单、双或四(条数据线)SPI Flash存储介质。最高传输速率是普通SPI总线的4倍,数据宽度同样也是32bit。
警告:由于48引脚封装,IO管脚资源紧张,不支持QSPI.
SPI-MASTER主要特征
- 支持SPI和QSPI传输模式
- SPI读/写 CMD、ADDR、DUMMY、DATA长度均可配置,CMD,ADDR和支持中断功能,可配多种中断触发条件
- TX/RX FIFO深度为8,宽度为32Bits
- 仅支持Master
- MSB在前
- SPI总线忙状态标志
SPI-MASTER功能与操作说明
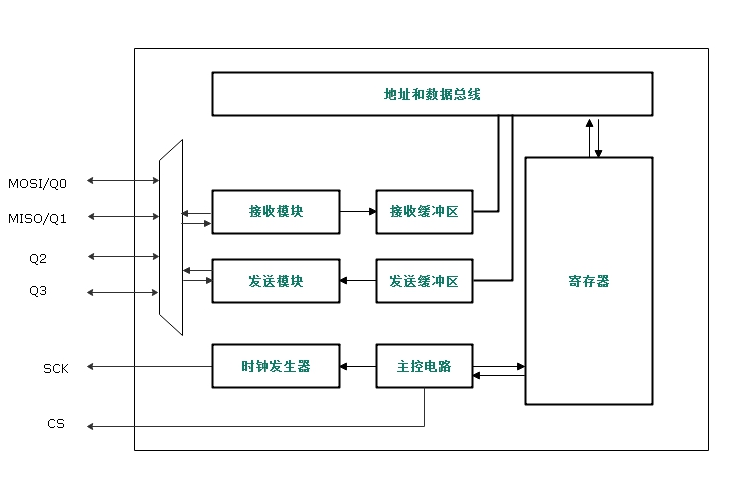
通常SPI通过4个引脚与外部器件相连:
- MOSI:SPI模式设备输出引脚,发送数据。
- MISO:SPI模式设备输入引脚,接收数据。
- SCK:串口时钟引脚,设备输出
- CS:片选引脚,设备输出
数据发送与接收
设备配置为SPI模式,配置步骤如下:
- 配置GPIO复用,复用为SPI功能
- 设置SPI Dummy
- 读操作通过SPI的STATUS寄存器[0]发起,然后读取STATUS寄存器[20:16]判断是否接收到数据,若FIFO非空,通过RXFIFO读取数据
- 通过SPI的STATUS寄存器[28:24]判断发送FIFO是否有空,若FIFO有空,通过TXFIFO写入数据,然后通过STATUA寄存器[1]发送写操作
设备配置为SPI模式,时序图如下:

- SPI通信过程,数据在下降沿改变,上升沿锁存,此模块只支持一种时钟相位。
- MSB在前,若CMD或者ADDR不足32位,需移位到高位。
- Dummy byte根据外围器件定义,data只支持32bit。
设备配置为QSPI模式,时序图如下:

- QSPI通信过程,数据在下降沿改变,上升沿锁存,此模块只支持一种时钟相位。
- MSB在前,若CMD或者ADDR不足32位,需移位到高位。
- QSPI模式CMD需要按bit展开写入CMD寄存器,例如0xEB,展开成为0x11101011。
- Dummy byte根据外围器件定义,data只支持32bit。
访问SPIMASTER设备
应用程序通过库函数提供的SPIM控制函数来访问SPIM设备硬件,相关接口如下所示:
| 函数 | 描述 |
|---|---|
void mem_init() |
复用GPIO口函数 |
void mem_set_dummy() |
设置SPIM的dummy |
void mem_read() |
SPIM读 |
void mem_write() |
SPIM写 |
SPIM引脚复用
通过下列函数对SPIM接口进行复用设置:
void mem_init();
设置SPIM dummy
通过下列函数设置SPIM传输dummy:
void mem_set_dummy(SPI_TypeDef *SPIx,uint8_t cycles);
SPIM设备读
通过下列函数进行SPIM读操作:
void mem_read(SPI_TypeDef *SPIx, int addr,uint8_t* buffer,uint8_t size);
SPIM设备写
通过下列函数进行SPIM写操作:
void mem_write(SPI_TypeDef *SPIx, int addr,uint8_t* buffer,uint8_t size);
SPIM设备使用示例
#include <stdio.h>
#include <pulpino.h>
#include <string_lib.h>
#include <utils.h>
#include "spi_flash.h"
#include <udma.h>
#include <int.h>
#include <spi.h>
#include <spim.h>
int main(int argc, char **argv)
{
uint32_t ID = 0;
uint8_t RamData1[4];
uint8_t RamData[4];
union{
uint32_t U32;
uint8_t chr[4];
}data;
/*puf initialize*/
init_puf(0);
/*spi initialize */
mem_init();
mem_read(UC_SPIM,0x1A107018,&ID,4);
printf("ID is %x\r\n",ID);
RamData1[0] = 0x00;
RamData1[1] = 0x00;
RamData1[2] = 0x00;
RamData1[3] = 0x01;
data.U32 = 1;
mem_write(UC_SPIM,0x00330000,&data.chr,4);
mem_read(UC_SPIM,0x00330000,&RamData,4);
printf("RamData1 0 is %x\r\n",RamData[0]);
printf("RamData1 1 is %x\r\n",RamData[1]);
printf("RamData1 2 is %x\r\n",RamData[2]);
printf("RamData1 3 is %x\r\n",RamData[3]);
while(1);
return 0;
}